Электронная архитектура в автомобилестроении
В связи с ростом требований к безопасности, комфорту, уровню развлечений и охране окружающей среды электронные системы в автомобилях получают все больше функций и характеризуются высоким уровнем сложности. Для сохранения этого уровня в будущем требуются самые современные технологии, методы и инструменты системной архитектуры. Вот о том, как выглядит современная электронная архитектура в автомобилестроении, мы и поговорим в этой статье.

История развития электронной архитектуры автомобиля
На протяжении многих десятилетий в истории автомобилестроения использовалось совсем небольшое количество электрических систем: зажигание, освещение, стеклоочистители, звуковой сигнал, датчик уровня топлива, различные индикаторы и радиоприемник. Полупроводники — за исключением радиоприемников — изначально использовались только для выпрямления (генератор постоянного тока был заменен генератором переменного тока лишь в 1963 году) и затем для электронного управления (транзисторное зажигание появилось в 1965 году).
Реализовать некоторые автомобильные функции электромеханическими средствами и дискретными электронными компонентами либо не удалось вовсе, либо удалось лишь при несопоставимо высокой сложности. К примеру, первая электронная антиблокировочная система (ABS) была разработана еще в 1970 году, но так и не дошла до серийного производства из-за своего размера, массы и стоимости. К середине 70-х годов развитие интегральных схем для широкого спектра областей применения дошло и до автопрома и вызвало революционные изменения в автомобильной электронике.
Один из первых примеров объединения электронных систем в сеть появился при разработке системы управления тяговым усилием (TCS). Это объединение в сеть было изначально реализовано чисто механическими средствами. Дроссельная заслонка в воздухозаборной системе ДВС была оснащена устройством, которое можно было активировать непосредственно через систему управления тяговым усилием. Системе управления двигателем было невозможно распознать, чем вызвано перемещение дроссельной заслонки — нажатием педали газа или вмешательством системы управления тяговым усилием.
Следующим этапом стала реализация электронного подключения к блоку управления двигателем через интерфейс ШИМ (широтно-импульсной модуляции) для улучшения динамической реакции. Его можно было использовать для передачи сигнала на блок управления двигателем для уменьшения крутящего момента двигателя. Тогда оно было реализовано в виде дросселирования подачи воздуха, уменьшения впрыска или опережения момента зажигания.
Из-за постоянного ужесточения требований к составу отработавших газов те возможности, что имелись на момент соединения системы управления тяговым усилием и системы управления двигателем были уже недостаточны. Теперь требовалось сообщить системе управления двигателем, как уменьшение крутящего момента, запрашиваемое системой управления тяговым усилием, осуществляется в воздушном, топливном каналах или цепи зажигания. Поэтому было необходимо создать более мощный интерфейс, через который система управления тяговым усилием могла бы передать системе управления двигателем запрос на необходимый крутящий момент и динамическую реакцию. I/I наоборот, фактический момент, обороты двигателя и резерв настройки тока должны были передаваться на блок управления TCS. Это оказалось сложно и дорого в плане количества проводов, необходимых для передачи этих разных данных через дискретные и, к примеру, ШИМ-интерфейсы. Система шин CAN (сеть контроллеров) была представлена в 1991 году в качестве альтернативы дискретным проводам. Так был заложен фундамент для современного объединения автомобильных систем в сеть.
Электронная архитектура сегодня
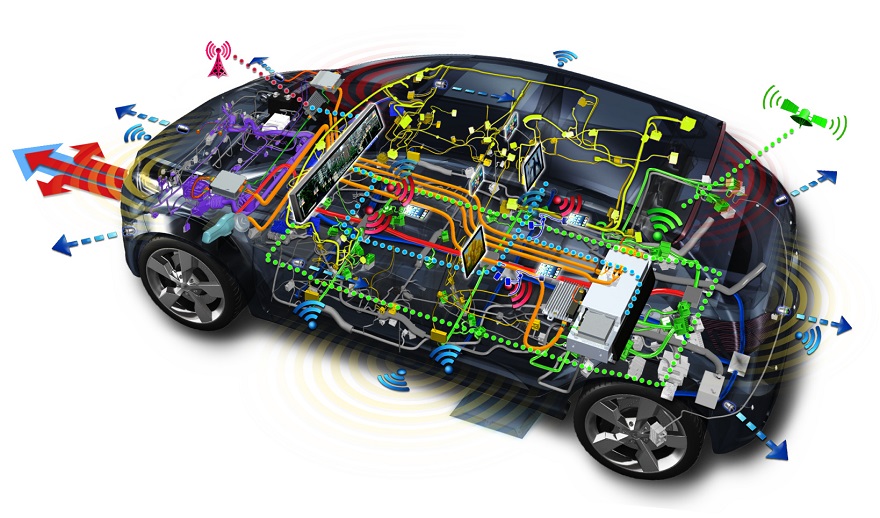
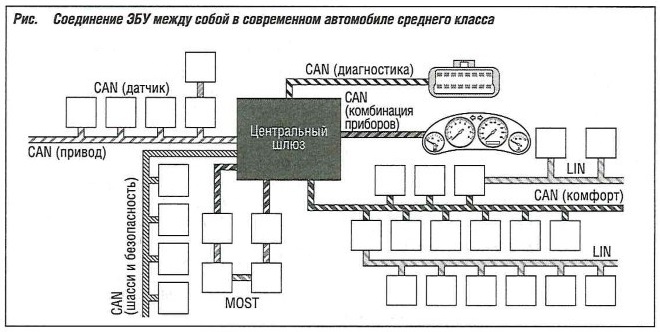
В современных автомобилях практически все ЭБУ прямо или косвенно (например, через шлюзы) соединены друг с другом (рис. » Соединение ЭБУ между собой в современном автомобиле среднего класса» ). Объединение в сеть дошло до того, что 60 и более ЭБУ общаются между собой по нескольким шинам CAN и другим шинам — FlexRay, MOST (транспорт для медиа ориентированных систем) и LIN (локальная сеть взаимодействия). Так, например, блок управления системы динамической стабилизации (ESP) передает в сеть информацию о скорости автомобиля. Автомобильный радиоприемник может использовать эту информацию, к примеру, для адаптации громкости к скорости автомобиля.
Благодаря объединению ЭБУ в мощную сеть можно реализовать множество новых функций без какого-либо дополнительного оборудования, т.е. исключительно путем обмена данными и с помощью программного обеспечения. Одним из примеров служит открывание дверных окон путем более длительного нажатия кнопки на брелоке дистанционного управления. Таким образом, например, можно равномерно вентилировать салон летом, когда открываются двери. Для этого блоки стеклоподъемников и система центрального запирания обмениваются необходимой информацией. Программное обеспечение запускается либо на ЭБУ системы центрального запирания, либо на ЭБУ стеклоподъемников. Во многих автомобилях эти две системы имеют общий ЭБУ, в этом случае новые программные функции можно реализовать даже еще проще.
Это демонстрирует тенденцию, изначально встречавшуюся в кузовной электронике: интеграция отдельных ЭБУ с образованием центрального ЭБУ (рис. «Сравнение децентралихованного и централизованного управления» ). Эти центральные ЭБУ соединяются с датчиками и исполнительными механизмами либо через дискретные, аналоговые провода, либо через шины. Последние значительно уменьшают количество штырьков в разъеме ЭБУ и, соответственно, стоимость проводки. Датчики и исполнительные механизмы, подключаемые через шины, также называют «интеллектуальными». Для подключения к шине они должны иметь электронную схему, которая во многих случаях также включает в себя функции кондиционирования сигнала датчика или функции драйвера исполнительного органа. Но в то же время использование электронной схемы означает рост затрат на датчики и исполнительные механизмы. Таким образом, минимизация суммарных затрат, в том числе на электронику и провода, является важной задачей при определении концепций организации сети.
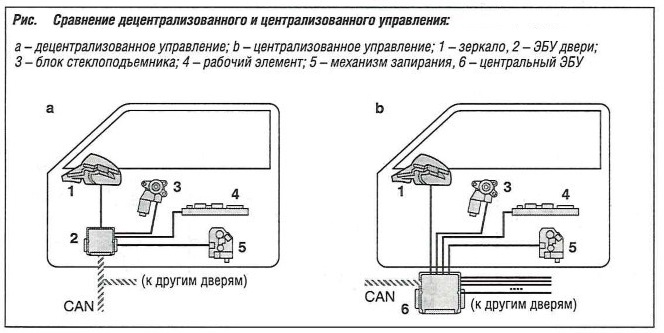
К примеру, логическая цепь для функции защиты пальцев у блоков стеклоподъемников во многих исполнениях расположена прямо в ЭБУ на электроприводе стеклоподъемника. Сигнал активации нормальной работы, например, при упомянутом выше открывании стекол с брелока, передается по шине LIN с центрального ЭБУ кузовной электроники (ВСМ). В этом отношении речь идет о серверной архитектуре.
Тенденции развития электронной архитектуры
Упомянутая выше централизация и использование интеллектуальных датчиков и исполнительных механизмов в области кузовной электроники нашла распространение в других функциональных областях автомобиля (информация для водителя, динамика движения и безопасность) и продолжит расширяться в ближайших поколениях автомобилей. В дополнение к комбинации функций различных ЭБУ в одном центральном ЭБУ используются локальные главные компьютеры (рис. «Возможный сценарий для автомобиля представительского класса в будущем» ).
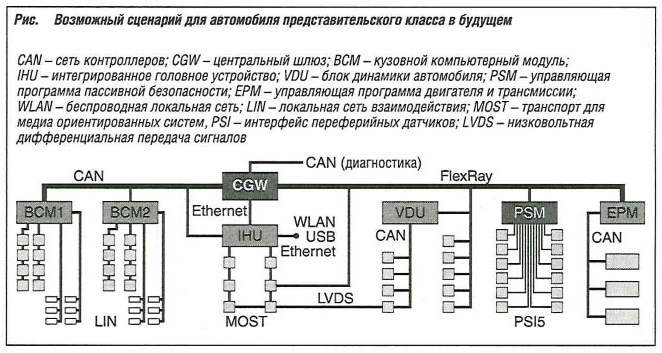
ЭБУ интеллектуальных датчиков и исполнительных органов автомобиля зависят от этих главных компьютеров (ВСМ, IHU и т.д.). Функции, требующие высокой степени интеграции команд управления информацией в основном воспроизводятся на этих главных компьютерах в программном обеспечении. Чтобы эти функции могли работать и на ЭБУ других платформ, требуется стандартная программная архитектура. Добиться этого можно посредством инициативы AUTOSAR (см. раздел «AUTOSAR» ниже).
Архитектура электронных систем автомобиля
С увеличением количества электроники в автомобиле растет и потребность в мощных процессах разработки и методах их описания для архитектуры электрических и электронных систем.
Понятие «архитектура» обычно обозначает искусство строительства. В строительстве архитектор проектирует здание, создавая чертежи в различных проекциях, и строители-подрядчики выполняют работу в соответствии с пожеланиями заказчика и граничными условиями. Проект абстрагируется от реальности в плане конкретных аспектов (например, геометрических условий или электропроводки). Здание может быть возведено окончательно на основании проектов всех необходимых аспектов.
Применительно к автомобилям это называется «Е/Е-архитектурой». «Е/Е» означает электрические и электронные аспекты автомобиля. «Проекты» Е/Е-архитектора в дальнейшем мы будем называть общим понятием «модель».
У автопроизводителей и их поставщиков разные взгляды на то, сколько и каких моделей требуется для полного описания электрических и электронных систем автомобиля. Представленные ниже модели хорошо зарекомендовали себя на практике и являются необходимой основой для описания объема Е/Е-архитектуры.
Понятие архитектуры часто используется в литературе и публикациях для обозначения самих моделей. Здесь четко различают рабочую операцию (разработка архитектуры) и представление результата (модель).
Модели Е/Е-архитектуры
Модели Е/Е-архитектуры отражают результаты различных аспектов интеграции электронных систем в автомобиле (рис. «Модели Е/Е-архитектуры» ). Эти аспекты обычно рассматриваются одновременно, так, как и геометрия (структура кузова) и новые системы анализируются на этапе разработки концепции. В процессе разработки автомобиля может возникнуть ситуация, когда электронная система в выбранной технологии не вписывается в имеющееся пространство. В этом случае нужно найти компромисс.
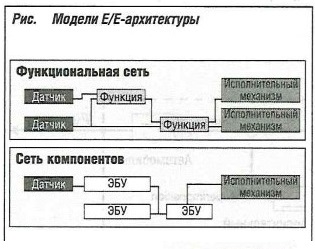 |  |
Функциональная сеть
Функциональные модели — предварительная стадия конкретных технических систем. Они описывают элементы, необходимые для реализации необходимых характеристик, не вдаваясь в конкретную технологию. На примере рулевого управления с наложением это означает разбивку на такие элементы, как:
- Переменное передаточное отношение;
- Управление стабилизацией;
- Модель автомобиля;
- Исполнительный механизм;
- Автомобиль;
- Водитель.
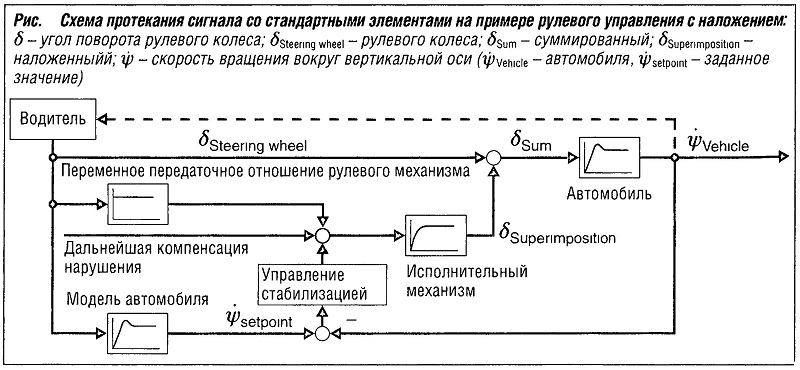
Функциональные модели (рис. «Схема протекания сигнала со стандартными элементами на примере рулевого управления с наложением» ) обычно создаются в виде схемы прохождения сигналов по DIN 19226.
Сеть компонентов
Технологическая модель
Технологическая модель описывает, какая техническая реализация используется для указанных элементов без объединения их в модули, такие как электронные блоки управления (ЭБУ). Создаются «технологические блоки».
Таким образом, фильтрацию сигналов можно реализовать с дискретными компонентами с помощью цифровой цепи или фильтрующего программного обеспечения в микроконтроллере. С помощью цифровой цепи или микроконтроллера можно даже реализовать функцию контроллера. Стабилизации напряжения можно добиться либо с помощью сглаживающего конденсатора, либо конвертера напряжения DC/DC.
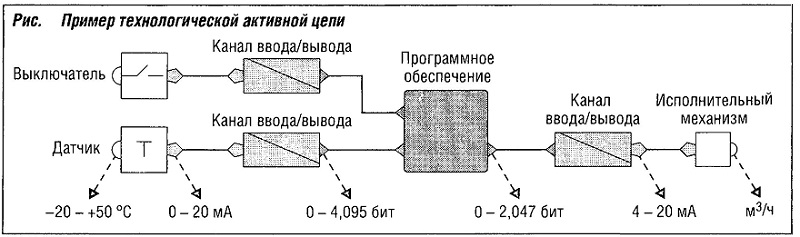
На выбор технической реализации с одной стороны влияет функция, а с другой — затраты. Прежде чем сгруппировать технологические блоки в модули в виде ЭБУ, первым делом нужно попытаться найти синергизм с технологическими блоками, интегрируемыми в будущем. Создается технологическая активная цепь (рис. «Пример технологической активной цепи» ). Если, к примеру, имеется конкретная сенсорная технология для звена активной цепи, сигнал которого нужен другой активной цепи, то она тоже будет использоваться. Это происходит даже при переопределении этого датчика под дополнительного пользователя, т.е. при менее строгих требованиях, например, к дальности приема сигналов или к точности.
Вместе с тем, важно хранить исходное требование в базе данных, так как этого синергизма может не оказаться в другом автомобиле.
В автомобильной промышленности для описания оборудования обычно используется номенклатура по DIN EN 60617.
Узловая модель
Звенья технологических активных цепей объединяются в группы в различных местах, называемых узлами. Здесь поддерживается строгое соблюдение оптимальных затрат на интеграцию технологических блоков. Например, делаются попытки интеграции программных частей нескольких технологических активных цепей на общем микроконтроллере. Там, где это возможно, используются сигналы датчиков и исполнительные механизма. Но история показывает, что замечательного синергизма можно добиться даже в области механики — например, в создании вакуума для пневматического усилителя тормозов через впускной трубопровод двигателя с искровым зажиганием.
Аппаратная модель ЭБУ
Эта модель описывает структуру электронного оборудования ЭБУ. Она создается путем отнесения конкретных электронных компонентов из технологических активных цепей электронному модулю в узле. Поэтому ЭБУ, вообще говоря, является сборным пунктом электронных компонентов различных систем, «интеграционной платформой».
Программное обеспечение для управления различными системами из различных источников (автопроизводителей или их поставщиков) интегрируется в микроконтроллеры, размещенные в ЭБУ. Путем объединения ЭБУ в сеть можно реализовывать сложные распределенные функции, использующие датчики и исполнительные механизмы из различных мест установки в автомобиле.
На стадии разработки для электрических и электронных компонентов ЭБУ изначально используются традиционные электрические схемы. Затем определяется механика ЭБУ, дизайн и технология подключения. Модель на ранней стадии разработки ограничивается очень грубым представлением.
Программная модель ЭБУ
Из классической информационной технологии (для систем персональных компьютеров) имеется несколько признанных методов разработки архитектуры программного обеспечения с соответствующими моделями (например, Product Line Approach). Однако до сих пор не было разработано стандарта на разработку архитектуры программного обеспечения в автомобилестроении. С появлением стандарта AUTOSAR архитектура программного обеспечения в автомобиле в настоящее время определяется непосредственно.
Стандарт AUTOSAR определяет структуру программного обеспечения близко к уровню аппаратной части и интерфейсы между функциями приложений (рис. «Изображение архитектуры AUTOSAR» ). Кроме того, AUTOSAR определяет стандартизированные форматы обмена, поддерживаемые популярными инструментами моделирования.
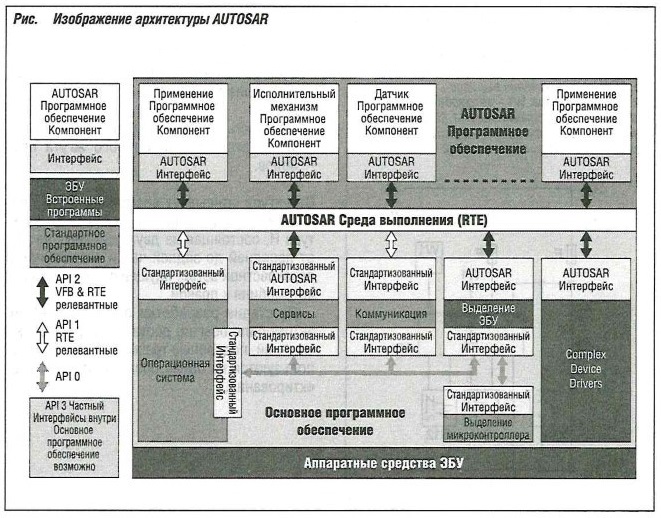
Различают базовое и прикладное программное обеспечение. Блоками базового программного обеспечения являются, например, драйверы устройств, программное обеспечение для связи, операционная система и аппаратная абстракция.
Сетевая модель связи
Поскольку все технологические блоки автомобиля на предыдущих этапах были распределены между ЭБУ, мы получаем сеть этих ЭБУ с их коммуникационными взаимосвязями. Сетевая модель связи представляет все ЭБУ в автомобиле, подключенные к шине и, соответственно, прямо или косвенно соединенные друг с другом.
Каждый сигнал, передаваемый между двумя или несколькими ЭБУ, относится к подходящей шинной системе. В этом плане AUTOSAR определяет стандартизированные форматы обмена, позволяющие описать связь по шине. Формат обмена AUTOSAR, начиная с версии 3.0, содержит стандарт ASAM FIBEX.
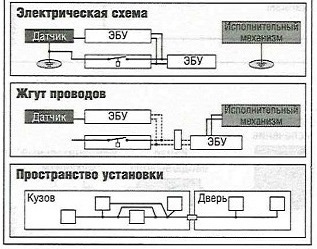
Электрическая схема
Отнесение технологических блоков к ЭБУ и модулям датчиков и исполнительных механизмов также привело к появлению сети электрических нагрузок/потребителей, требующей подходящего энергоснабжения. С одной стороны, важно защитить отдельные электрические цепи, чтобы короткое замыкание не повлияло на всю сеть. С другой стороны, не на все цепи, должна подаваться электроэнергия в каждом рабочем режиме.
Для этого был введен принцип «выводов». К примеру, на вывод 15 электроэнергия подается только при включении зажигания.
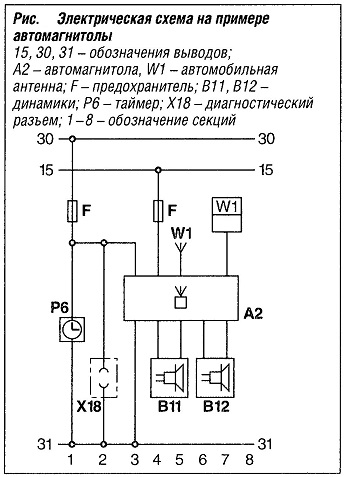
Электрическая схема (рис. «Электрическая схема на примере автомагнитолы» ) показывает электрическое соединение и защиту предохранителями отдельных модулей без учета монтажного положения. Здесь можно увидеть цвета проводов (на рисунке не показаны) и соответствие выводу или предохранителю. Выводы обозначаются по DIM 72552.
Плюс напряжения питания обычно изображается в верхней половине, а минус (масса) — в нижней.
Жгут проводов и пространство установки
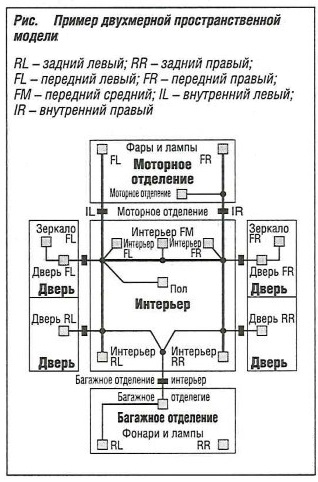
Эта модель группирует электрические и электронные модули в определенном месте в автомобиле (рис. «Пример двухмерной пространственной модели» ). Таким образом, провода, соединяющие между собой ЭБУ, и провода питания нагрузок/потребителей сводятся вместе на станках для скрутки жгутов. Так получаются жгуты проводов. Здесь необходимо соблюдать множество разных граничных условий:
- Концепция изготовления (одно- или многосоставный жгут проводов);
- Поперечные сечения (гибкость);
- Электромагнитная совместимость (ЕМС);
- Рассеяние тепла;
- Масса;
- Стоимость (например, меди);
- Устройство автомобильного жгута проводов.
Структура описывает возможные пути прокладки проводов в кузове, например, структура Н, состоящая из двух основных ветвей от передней до задней части автомобиля и перекрестной ветви, идущей с левой стороны автомобиля к правой.
На стадии разработки общей концепции автомобиля обычно достаточно двухмерны моделей; подробные трехмерные модели используются на более поздних стадиях проектирования.
Процесс разработки Е/Е-архитектуры
Процесс разработки Е/Е-архитектуры соединяет между собой отдельные стадии проектирования на логической и временной основе и обеспечивает критерии качества в начале и в конце стадии проектирования.
Поскольку Е/Е-архитектура для автомобилестроения — все еще молодая дисциплина, процессы у автопроизводителей и их поставщиков пока сильно разнятся. Это относится и к количеству, и последовательности стадий проектирования, и к критериям качества.
Управление требованиями
Требования решающим образом определяют действия Е/Е-архитектора. Рекомендуется различать функциональные и нефункциональные требования. Функциональные требования означают желаемые характеристики при эксплуатации автомобиля. Нефункциональные требования означают техническое решение и поэтому их также называют проектными ограничениями.
Таким ограничением может быть, например, свободное пространство в центральной консоли для установки ЭБУ. Другим ограничением может быть максимально допустимое рассеяние тепла в месте, которое влияет на размещенную там силовую электронику.
Таким образом, например, аудиоусилители часто устанавливаются в багажниках, так как тепло в области панели приборов не может адекватно рассеиваться.
После подготовки документации по функциональным и нефункциональным требованиям начинается фактическая разработка Е/Е-архитектуры.
Разработка Е/Е-архитектуры
Разработка Е/Е-архитектуры может идти двумя путями: по принципу «снизу-вверх», т.е. начиная с существующих компонентов, и по принципу «сверху вниз», т.е. с реализацией всех ранее описанных этапов моделирования, начиная с функциональных и нефункциональных требований.
Принцип «снизу-вверх», вовремя создания Е/Е-архитектуры, начиная с функциональности существующих компонентов, предусматривает дополнение этих компонентов функционально-коммуникативными аспектами и прохождение соответствующих этапов моделирования. Этот подход обычно выбирается для создания Е/Е-архитектур последующих поколений существующих автомобильных платформ.
Принцип «сверху вниз» фокусируется на сложности функций и обычно выбирается для создания Е/Е-архитектур новых автомобильных платформ.
Использование Е/Е-концепций позволяет обмениваться данными с партнерами- разработчиками электронных компонентов и жгутов проводов.
Оценка моделей
Для всех методов необходимо соблюдать следующее: при переходе от одной модельной иерархии к следующей (например, от функциональной модели к технологической), список критериев оценки (например, повторное использование или тестируемость) сравнивается с набором конкретных решений (например, шинных технологий). Оценка конкретных решений по критериям позволяет решению принять форму на основе чисто функциональных требований и неизбежных граничных условий (критерий «MUST»). Эту процедуру также называют QFD (Развертывание функции качества).
Альтернативная процедура заключается в сравнении опорного решения (например, предыдущей модели организации сети) с альтернативными с помощью критериев оценки.
Она дает поистине быстрые результаты, но не абсолютный оптимум.
Поскольку критерии оценки всегда взвешиваются автопроизводителями по-разному, электронные системы автомобилей иногда значительно различаются.
Инструменты разработки Е/Е-архитектуры
Для моделирования архитектуры идеально подходит инструмент, который может соединить между собой различные модели и уровни моделей Е/Е-архитектуры. Таким образом, создается полностью соединенная документация. Это позволяет реализовывать различные дисциплины, являющиеся частью процесса разработки, в нужных точках. Кроме того, должна обеспечиваться возможность числовой регистрации свойств моделирования, чтобы можно было обеспечить оценку.
Между тем на рынке появились различные инструменты для разработки Е/Е-архитектуры, позволяющие выполнять моделирование архитектуры с помощью инструментов. Важным моментом является стандартизация моделей и их форматов данных. Только это обеспечивает конкуренцию между изготовителями инструментов и открывает различным дисциплинам возможности для присоединения к процессу в разных точках.
Для будущего плавного перехода к конфигурации системы и ЭБУ с помощью технологий AUTOSAR требуется инструмент разработки Е/Е-архитектуры для поддержки форматов обмена AUTOSAR, таких как «Описание системы» и «Описание компонентов программного обеспечения». Поэтому мы остановимся на стандарте AUTOSAR более подробно.
AUTOSAR
Партнерство AUTOSAR (открытая системная архитектура для автомобилестроения) было учреждено в июле 2003 года автопроизводителями и их поставщиками. Его главной целью является совместная разработка открытой программной архитектуры для автомобильных приложений будущего. Цели партнерства включают в себя стандартизацию фундаментальной инфраструктуры ЭБУ (базовое программное обеспечение), форматов обмена и функциональных интерфейсов. Они призваны заменить существовавшие в компаниях индивидуальные решения. Для того чтобы успевать за постоянным усложнением систем, в связи с появлением новых функций, используются концепции и методы на базе моделей. Требования к качеству и надежности выполняются путем использования проверенных стандартов.
На основе программного обеспечения со стандартизированной инфраструктурой, состоящей, главным образом, из стандартных модулей, каждый автопроизводитель может реализовать свой контент (прикладное программное обеспечение).
Цели и концепции AUTOSAR
Стандарт AUTOSAR преследует следующие цели:
- Повторное использование программного обеспечения для разных ЭБУ, автомобильных платформ и автопроизводителей;
- Поддержка в интеграции программного обеспечения третьих лиц в области как базового, так и прикладного программного обеспечения;
- Поддержка смещения прикладного программного обеспечения между ЭБУ (статичная);
- Обмен стандартными аппаратными блоками (например, трансивер CAN) без изменений в прикладном программном обеспечении.
Программная архитектура, определяемая стандартом AUTOSAR (рис. 7), поддерживает четкое разделение между базовым и прикладным программным обеспечением. Это достигается несколькими абстрактными уровнями в базовом программном обеспечении — от драйверов устройств до сложных инфраструктурных сервисов и среды прогона (RTE) стандарта AUTOSAR.
Поскольку интерфейсы большинства модулей базового программного обеспечения в этих слоях стандартизированы, то стандартные аппаратные блоки и соответствующие драйверы можно заменить без изменения прикладного программного обеспечения.
И наоборот, прикладное программное обеспечение, ограничивающееся использованием этих стандартных интерфейсов, можно гораздо проще ввести в ЭБУ на стадии разработки и даже переместить в другой ЭБУ. Например, одно и то же прикладное программное обеспечение контроллера скорости автомобиля в зависимости от платформы автомобиля может работать на блоке управления двигателем, блоке управления трансмиссией или другом ЭБУ без изменения прикладного программного обеспечения. Для этого, естественно, требуется достаточно мощный ЭБУ и соответствующая организация сети.
Стандартизация базового программного обеспечения и возможность его конфигурации в зависимости от требований к прикладному программному обеспечению позволяет повторно использовать модули базового программного обеспечения для разных автомобильных платформ и автопроизводителей. Это повышает качество программного обеспечения, поскольку никаких изменений на Уровне продукта не происходит, сокращает затраты на разработку путем повторного использования и образует устойчивую основу. Для постоянного роста сложности и объединения функций приложений.
Партнерство AUTOSAR также разрабатывает концепции на базе моделей для раннего Утверждения проекта системы. На основе Формализованного описания выполняется проверка соответствия интерфейсов прикладного программного обеспечения друг другу, при этом прикладное программное обеспечение не обязательно должно быть в виде полной программы.
Перспективы развития электронных систем
С ростом количества и степени интеграции электронных систем необходимо использовать подходящие процессы, методы и инструменты при разработке Е/Е-архитектуры. Разработка Е/Е-архитектуры в автомобилестроении превратилась в независимую задачу и оказывает решающее влияние при разработке новых автомобилей. Если описанные здесь процедуры будут последовательно применяться и развиваться, то в будущем автомобильная электроника будет управляемой и продолжит вносить значительный вклад в улучшение потока перевозок, безопасности движения, повышение комфорта и экономичности.
О чем мы не задумываемся, садясь в автомобиль

Двигатель: турбонагнетатель, непосредственный впрыск, система изменения подъема клапанов (CVVL)
Технологии создания двигателей были и остаются одной из главных тайн большинства автопроизводителей. Они тщательно берегутся от конкурентов, защищаются патентами, служат поводом для гордости перед специалистами и клиентами. Но, как ни удивительно, в первой четверти XXI века очень многие «мотористы» пришли к неким общим принципам. Пусть эти принципы и реализованы у каждого по-своему, но под капотами большинства современных автомобилей массовых и относительно массовых марок и моделей сейчас, как правило, располагаются бензиновые силовые агрегаты с рабочим объемом 1,5-2,4 л, с системой непосредственного впрыска топлива и турбонаддувом. Ну и еще с «чем-нибудь», что позволяет в реальном времени регулировать фазы газораспределения и/или подъем клапанов. Во многом это, кстати, обусловлено и современными экологическими требованиями. К примеру, старые карбюраторные двигатели в принципе не могут уложиться в них уже лет 20, да и первые «впрысковые» моторы, где впрыск был еще «одноточечным», тоже давно сдали в этом плане позиции.
Попробуем вспомнить, с чего начинались эти технологии, необходимые по нынешним временам для создания эффективного двигателя, укладывающегося в экологические нормы, но при этом способного обеспечить автомобилю достойную динамику и интересный характер.
Турбонаддув был изобретен и запатентован в 1905 году швейцарским инженером Альфредом Бюхи, работавшем в исследовательском отделе фирмы Sulzer Brothers в городе Винтертур. Еще за 20 лет до этого было выяснено, что если подавать в цилиндры больше воздуха, то можно увеличить и количество подаваемого топлива – такая более плотная топливовоздушная смесь позволит повысить мощность. Но в качестве решения в то время использовался механический нагнетатель, который, в свою очередь, приводился от коленчатого вала двигателя, а значит, отбирал мощность и снижал КПД. Бюхи же решил использовать энергию выхлопных газов, чтобы они не просто выбрасывались в атмосферу, а «попутно» раскручивали лопасти турбонагнетателя. Такое решение позволяло увеличить мощность двигателя сразу процентов на 40!Однако до автомобильных двигателей турбонаддув дошел многими годами позже, начав свой победный путь в авиации, где двигатели крупнее и дороже. В то же время компактным и относительно недорогим двигателям для автомобилей не хватало ни надежности конструкции, ни термоустойчивости материалов. Немудрено, что первым «автомобильным» двигателем с турбонаддувом стал в конце 30-х годов достаточно крупный двигатель грузовика Saurer. А легковушки (в том числе даже спортивные) и в это время, и еще больше четверти века до того обходились механическими нагнетателями. В 1962-1963 годах сразу две американские автокомпании попытались было установить турбонаддув на серийные автомобили. Но успеха не получилось – нужную надежность обеспечить не удавалось.

Технологии и материалы доросли до нужных требований только к 70-м годам ХХ века, и тут, кстати, уже не обошлось без мира гонок, откуда вообще в массовое производство пришло немало решений. В конце семидесятых «турбо» стало входить в моду, а в 1981-м наддув дошел и до массового сегмента. После этого двигатели с турбонаддувом стали уже абсолютно нормальной частью автомобильного мира. Ну а на современном этапе, как уже сказано выше, турбонаддув во многом позволяет обеспечить хорошую мощность даже для компактных «экологичных» силовых агрегатов.
Непосредственный впрыск топлива – технология, которая, вообще-то, роднит бензиновые и дизельные двигатели. И там и там подача топлива осуществляется непосредственно в камеру сгорания цилиндра. В дизелях с их высокой степенью сжатия такой принцип используется достаточно давно (кстати, истории про «дорогущий» ТНВД – топливный насос высокого давления – одно из вечных опасений для задумывавшихся о покупке дизельной легковушки), а вот в бензиновых двигателях к непосредственному впрыску пришли относительно недавно. Во-первых, оборудование высокого давления и вправду недешево, а во-вторых, обеспечить оптимальный состав смеси для бензиновых двигателей позволила только дошедшая до определенного уровня совершенства электроника. Опять же, мы говорим о применении именно в массовом автомобилестроении: в авиации двигатели с непосредственным впрыском появились уже в начале прошлого столетия.
На автомобилях место карбюратора занял сначала одноточечный впрыск (точно так же один на весь впускной коллектор), потом появился распределенный (или многоточечный) – уже с отдельной форсункой на цилиндр, но еще подающий топливо в коллектор перед впускным клапаном. С непосредственным впрыском эксперименты проводились, но до массового применения было еще далеко: как правило, технологию использовали при производстве дорогих, а то и вовсе эксклюзивных моделей. Система не подтвердила надежность даже там, где на бюджеты особо не скупились, – в гонках «Формулы-1». Даже когда электроника практически доросла до нужного уровня – в 1990-е годы – первые уже действительно серийные «непосредственно-впрысковые» двигатели оказались, скажем так. небеспроблемными.По большому счету, настоящий прорыв случился уже в XXI веке, в «нулевые». Сложился весь пасьянс: менее чем за десятилетие до совершенства были доведены и материалы, и конструкция, и «софт». Более того, возникла и объективная потребность: непосредственный впрыск с его возможностью максимально точно регулировать и дозировать подаваемую в цилиндры топливовоздушную смесь оказался настоящей палочкой-выручалочкой для современных двигателей, сочетающих относительно небольшой рабочий объем, достаточную в большинстве случаев мощность и хорошие экологические показатели. Теперь такие системы взяты на вооружение практически всеми ведущими автопроизводителями.

Система постоянной регулировки фаз газораспределения – самая «молодая» разработка в «триаде» прорывных технологических решений для двигателей, о которых мы говорим. Притом что сама необходимость обеспечивать двигателям возможность работать с небольшим перекрытием фаз (одновременным открытием впускных и выпускных клапанов) на малых оборотах и, наоборот, длительным на оборотах высоких, в диапазоне максимальной мощности – известна давным-давно. Спортивные двигатели, для которых высокие обороты – родная стихия, давно оснащались «горбатыми» распределительными валами. Но при этом и холостые обороты у них были много выше «гражданских», серийных двигателей. Вот только в любом случае было «либо так», «либо так». То есть составляющей частью настройки двигателя был подбор «физически» (ну или, точнее, геометрически) нужного профиля распределительного вала. И профиль этот был в серийном автомобиле «раз и навсегда», а в спортивных – «перенастройка» осуществлялась заменой распредвала на более подходящий случаю. Зависимость фаз от профиля конкретного установленного вала оставалась неизменной. В начале 1990-х годов различные производители стали предлагать серийные решения, позволявшие проводить такую «перенастройку» за счет конструкции двигателя – прямо в процессе его работы. Система VTEC (Variable Valve Timing and Lift Electronic Control) после достижения двигателем определенных оборотов (в реальности эта граница проходила примерно на 6200 об/мин.) вводила в действие третий – более высокий – кулачок. На высоких оборотах двигатель обретал новый характер. Водитель, по своему стилю езды не «крутивший» двигатель до подобных оборотов, мог бы всю жизнь проездить на таком автомобиле и понятия не иметь об этом «чуде». Позже появились различные версии VTEC – в том числе и более «приземленные», ориентированные на более низкие обороты.

Однако и здесь настоящий прорыв случился на основе несколько иной технологии – с появлением «гидроуправляемой муфты», или попросту «фазовращателя». Эта муфта на распределительном валу позволяла несколько поворачивать его относительно корпуса по мере необходимости за счет давления масла и наличия у муфты внутренних полостей. А следовательно, плавно регулировать фазы. В наиболее простом исполнении это переключение между режимами холостых оборотов, максимально тяговитым диапазоном (максимальный крутящий момент) и максимальной мощности. В современном – плавная оптимальная подстройка двигателя во всем диапазоне оборотов. По такому принципу сейчас работает большинство систем, а особенности конструкции и обозначения у разных автобрендов при этом могут быть и собственные. Аббревиатура CVVT и вовсе полюбилась доброй полудюжине производителей.
Все перечисленные технологии, когда-то прошедшие непростой путь становления, теперь доступны каждому. К примеру, в России уже прекрасно известны кроссовер HAVAL F7 и его ближайший родственник, купе-кроссовер F7x. Их двигатели имеют все перечисленные технологии, более того, инженеры смогли предложить и собственные усовершенствования. На HAVAL F7 и F7x могут устанавливаться два варианта двигателей (1,5 л или 2,0 л), но в любом случае эти двигатели имеют систему непосредственного впрыска с рабочим давлением 200 бар. Она позволяет обеспечить легкий холодный пуск, снизить выброс вредных веществ, устанавливает оптимальную работу двигателя на всех режимах. В обоих случаях двигатели оснащены и турбонаддувом, причем с особо точным электронным управлением. Он начинает помогать уже на низких оборотах, что позволяет говорить о преодолении эффекта «турбо-лага», годами бывшего бичом подобных конструкций. Ну а на средних и высоких оборотах электронное управление позволяет воспользоваться всеми преимуществами турбированного мотора.

Помимо системы VVT во впускном и выпускном тракте, о принципе действия которой мы уже рассказали, двигатель с рабочим объемом 1,5 л (его обозначение – GW4B15) оснащается системой бесступенчатого изменения высоты подъема клапанов CVVL – это одна из наиболее современных версий технологий регулировки фаз. Причем в Haval используют именно собственную, запатентованную технологию. Здесь регулировка высоты подъема осуществляется путем изменения положения управляющих клапанами коромысел. Отвечает за это специальный электромотор, через червячную передачу приводящий в движение управляющий вал, и тот меняет положения коромысел. В CVVL нового поколения добавлены и возможность асинхронного открытия клапанов, и функция регулировки фаз газораспределения при малой высоте поднятия клапанов. Только использование этих передовых систем позволило двигателям HAVAL F7 и F7x стать примерно на 30% экономичнее предшественников. Есть и еще немало хитростей, которые разработчики использовали для повышения эффективности и надежности. К примеру, на двухлитровом двигателе сами выпускные клапаны выполнены полыми и заполнены натрием для обеспечения более благоприятных терморежимов.
Трансмиссия с двумя сцеплениями (DCT)
Пожалуй, трансмиссия, в состав которой входят роботизированная коробка передач и два сцепления (Double-Clutch Transmission, или DCT) – решение, которое на современном этапе автомобилестроения переживает настоящий взлет.
Начнем с принципа ее работы, тем более что он достаточно понятен. Фактически DCT – это объединенные в одну конструкцию две коробки передач. Одна отвечает за «нечетные» передачи, вторая – за «четные», а сцепление у каждой свое. Пока включена одна (допустим, задействована третья передача), вторая – готовится. Современная электроника с возможностью «самообучения» старается предсказать, спрогнозировать дальнейшую необходимость. Автомобиль идет в разгон – значит, нужно готовить четвертую передачу, замедляется – вторую. И эта передача готовится заранее. Кстати, именно из-за такого принципа часто говорят, что трансмиссия DCT работает по «преселективному» алгоритму, то есть алгоритму предварительного выбора. Переключения происходят практически мгновенно, за доли секунды (8-200 миллисекунд), разрыва потока тяги практически нет. Чуть сложнее приходится блоку управления коробкой передач в случае, когда требуются неожиданные действия, допустим – переключения на две передачи или переход на пониженную в режиме «кик-дауна». Но и тут задержки всё-таки не критично велики.
Преимуществ DCT немало. Во-первых, такие коробки передач дешевле традиционных автоматических гидравлических. Во-вторых, лучшие образцы «роботов» имеют весьма малые потери энергии и по коэффициенту полезного действия едва ли не сопоставимы с остающимися в этом плане лучшими «ручными» механическими коробками передач. В-третьих, современный «робот» DCT не требует наличия физической – механической или гидромеханической – связи с управляющим органом (рычаг, селектор, подрулевые «лепестки») трансмиссии. А значит, обеспечивает экономию массы и дает более гибкие возможности компоновки автомобиля. Ну и последнее, но едва ли не самое важное – они обеспечивают максимально быстрые переключения.
При этом путь DCT в массовое автомобилестроение был ох как не прост! Трудно представить, но этот тип коробок передач едва ли не старше гидромеханических «автоматов», которые мы сами абзацем выше назвали «традиционными». Первый образец DCT был предложен и запатентован в 1935 году французом Адольфом Кегрессом, но пути в серию так и не нашел. На смену полуавтоматическим (в которых водитель сначала выбирал вручную нужную передачу, а потом происходило автоматическое переключение) коробкам передач надолго пришли гидромеханические «автоматы» – удобные и надежные, но достаточно сложные по конструкции и недешевые в обслуживании и ремонте. Вернулись к DCT, уже когда истек срок действия патента Кегресса.
К середине 2010-х годов DCT стали появляться в арсенале всё большего числа производителей, они стали достаточно совершенны. С учетом стоимости «ниже, чем у гидромеханической» и положительного влияния на снижение расходов топлива, взлет ставших надежными DCT был вполне ожидаем.

Не стали исключением и кроссоверы HAVAL F7 и F7x. Причем приглашенный компанией немецкий инженер Герхард Хеннинг пошел непростым, но верным путем. Его огромный специализированный опыт позволял изучить ошибки других, равно как и сильные их стороны. Под руководством Хеннинга была создана самостоятельная конструкция, 85 использованных в ней решений получили собственные патенты. Семиступенчатая (7DCT) коробка передач HAVAL с двойным сцеплением мокрого типа смогла войти в рейтинг «Топ-10 лучших коробок передач мира» по версии Китайской Академии оценки автомобилей (САЕА). Управление 7DCT HAVAL осуществляется электронно (fly-by-wire), а ее коэффициент полезного действия превышает 95%! Долговечности и надежности этой коробки передач во многом способствует и эффективная система охлаждения, разработанная инженерами бренда.
Система мониторинга слепых зон BSM и система кругового обзора 360°
Удивительные истории могут сопровождать не только сложные технические решения и потребовавшие немало труда инженеров конструкции. Вот часто ли автомобилисты, садясь за руль, задумываются о такой простой вещи, как зеркало заднего вида? А ведь эта нехитрая вещь когда-то пришла из автогонок.Самые первые, связанные с зеркалом заднего вида истории датируются 1906 годом. Только нет ясности, было ли оно действительно установлено тогда на чей-то «частный» автомобиль или просто писательница и первая в Британии автогонщица и обладательница ряда рекордов скорости Элизабетт Левитт в своей книге «Женщина и машина» высказала рекомендацию «иметь с собой в удобном во время вождения месте маленькое ручное зеркальце». В 1908 году «Предупреждающее зеркало для автомобилей» запатентовал француз Анри Кейн, но это еще ни к чему не привело.

А вот первый действительно подтвержденный случай использования зеркала заднего вида, установленного на автомобиль, датирован 1911 годом. И это использование было, как говорится, не от хорошей жизни. В гонке «500 миль Индианаполиса» на автомобиле Marmon Model 32 Wasp Рэю Хэррону пришлось выступать в одиночку, в то время как остальные гонщики ехали вдвоем – напарник пилота выполнял обязанности механика, а заодно и штурмана, информирующего об обстановке вокруг автомобиля. Хэррон же взял маленькое зеркальце и закрепил его в автомобиле – он видел такую идею несколькими годами ранее на конной повозке. Ну а поскольку Хэррон оказался еще и победителем, то лучшей «рекламы в автоспорте» было придумать трудно, хотя сам пилот и признавался, что из-за сильных вибраций в зеркало было почти ничего не видно.
Несколько позже Элмер Бергер установил зеркало на серийную версию выпускавшегося его компанией автомобиля, и именно он и остался в истории как «официальный изобретатель автомобильного зеркала».
Почти до середины ХХ века устанавливали только одно зеркало – центральное салонное. Затем оно «переселилось» на переднее крыло с водительской стороны, а второе – наружное – появилось еще позже. Иногда располагали зеркало почти на стойке крыши – так, чтобы смотреть в него через стекло двери. А иногда (особенно с появлением моды на панорамные передние стекла), наоборот, подальше вперед, на крыле. Кстати, такое решение можно встретить на японских автомобилях буквально до недавних лет выпуска. Да и сами корпуса зеркал зачастую становятся элементом дизайна. Но при всей распространенности и простоте зеркала заднего вида имеют один недостаток. И называется он «слепые зоны». Как ни крути, но какие-то пространства остаются скрытыми из поля зрения водителя из-за конструкций стоек кузова, ведь избавиться от них нельзя. Или пассажиры заднего ряда могут ограничить поле зрения, или даже подголовники пустых сидений. И в этих «слепых зонах» может таиться опасность. Как минимум оттуда внезапно может появиться выходящий на обгон мотоциклист. Вообще-то, принцип настройки зеркал таким образом, чтобы «слепых зон» не оставалось (или практически не оставалось), сформулирован и даже запатентован. Однако поверить, что в реальной жизни «так» будет настраивать их хотя бы большинство, сложновато.
Решить эту проблему удалось только с приходом на службу автомобилистам радарных датчиков. Системы мониторинга «слепых зон» фактически стали «вторыми глазами водителя». Несколько датчиков, установленных в задней части автомобиля, не «заслоняются» ничем и формируют сплошной «обзор». Более того, они контролируют относительные скорости движущихся объектов – нагоняет ли опасный объект сам автомобиль или, наоборот, отдаляется. Если ситуация таит в себе риск, что при маневре траектории могут пересечься, система подает сигнал.

Кроссовер HAVAL F7 и родственный ему купе-кроссовер F7х в самой высокотехнологично оснащенной комплектации Tech Plus имеют подобную систему, у HAVAL она обозначается BSM (Blind Spot Monitor). Более того, невидимые сигналы радарных датчиков обеспечивают охрану и на других «уровнях защиты». Например, система помощи при выезде с парковки задним ходом RCTA (Rear Cross-Traffic Alert) помогает водителю в заведомо затруднительной ситуации, когда приходится сдавать с парковочного слота задним ходом, а обзор по бокам закрывают другие автомобили. Датчики на корме автомобиля первыми «выглядывают из-за угла», и, если в поле контроля системы (а оно у нее значительно более «широкое», чем у BSM) оказывается поперечно движущийся автомобиль, мотоциклист, велосипедист, подается предупреждающий сигнал. На медленных скоростях (а особенно на бездорожье или в узких местах) удобно пользоваться и системой кругового обзора, камеры которой отслеживают обстановку по всему периметру автомобиля.
Адаптивный круиз-контроль
Автомобильный круиз-контроль впервые был установлен на серийную модель в 1958 году. Мы не зря уточнили «автомобильный», поскольку устройство, регулирующее частоту оборотов двигателя, было изобретено немного раньше. лет так на 200. В 1788 году разработанный Джеймсом Уаттом и Мэттью Болтоном центробежный регулятор уже «умел» поддерживать обороты парового двигателя в определенном диапазоне.
Да и для автомобилей-то сама идея круиз-контроля была запатентована почти десятилетием ранее. Причем сопровождается этот патент красивой и немного грустной историей о слепом изобретателе – инженере-механике Ральфе Титоре. Легенда гласит, что Ральф как-то ехал со своим адвокатом в его автомобиле, они вели оживленную беседу, адвокат отвлекался, и автомобиль ехал достаточно дёргано. Тогда инженер и задумался об устройстве для поддержания постоянной скорости. Начертить его схему Ральф, будучи незрячим, не мог – так что в начале 1950-х годов запатентовал именно идеи, которые и были реализованы в 1958-м. Надо отметить, это было далеко не единственным его изобретением.
Принцип работы круиз-контроля достаточно понятен, вне зависимости от того, используется механический или электронный способ. Водитель при движении с определенной скоростью подает сигнал фиксации этой скорости (активируется система заранее и пребывает «в ожидании»). Далее либо механический сервопривод, либо электронный блок управления фиксирует скорость вращения тросика спидометра или карданного вала. При ее уменьшении подается сигнал приводу управления «газом» – будь то простая дроссельная заслонка или сложная система непосредственного впрыска. Соответственно, автомобиль разгоняется, замедляется или даже начинает принудительно «тормозить двигателем». Система не пытается быть «умнее человека»: если водитель временно добавляет газ, установленная заранее скорость вновь восстанавливается после того, как педаль будет отпущена. А вот прикосновение к педали тормоза – это однозначный сигнал к тому, что автоматика уступает инициативу человеку, круиз-контроль отключается и переходит вновь в «спящее» положение.В дальних путешествиях круиз-контроль значительно снижает степень утомления водителя. А в не очень дальних поездках система может выступать определенной защитой от нарушений скоростного режима: водитель устанавливает скорость в разрешенных пределах, и автомобиль не разгонится до «превышения». Есть и недостатки. К примеру, на извилистых дорогах поддержание постоянной скорости не всегда полезно, а если на них могут встретиться еще и скользкие участки, то может быть и опасно. То есть системой нужно пользоваться «с головой».
Источник https://press.ocenin.ru/elektronnaya-arhitektura-v-avtomobil/
Источник https://www.popmech.ru/vehicles/657413-o-chem-my-ne-zadumyvaemsya-sadyas-v-avtomobil/
Источник
Источник

