Проверка кан шины мультиметром
CAN Технологии
Применяемая на автомобилях система CAN (Controller_Area_Network) позволяет установить связь между отдельными электронными блоками управления. При эксплуатации автомобиля и при диагностике его агрегатов эта система предоставляет возможность использования новых функций, которые не могут быть возложены на отдельно действующие блоки управления.
Применяемая на автомобилях система CAN позволяет объединить в локальную сеть электронные блоки управления или сложные датчики, как, например, датчик угла поворота рулевого колеса. Обозначение CAN является сокращением от выражения Controller:Area:Network (локальная сеть, связывающая блоки управления). Применение системы CAN на автомобиле дает следующие преимущества:
Обмен данными между блоками управления производится на унифицированной базе. Эту базу называют протоколом. Шина CAN служит как бы магистралью для передачи данных.
Независимо действующие системы, например, система курсовой стабилизации ESP, могут быть реализованы с меньшими затратами.
Упрощается подключение дополнительного оборудования.
Шина данных CAN является открытой системой, к которой могут быть подключены как медные провода, так и стекловолоконные проводники.
Диагностика электронных блоков управления производится посредством кабеля «К».
Диагностика некоторых компонентов оборудования салона автомобиля уже сегодня производится через шину CAN (например, это подушки безопасности и блоки управления в дверях автомобиля). В данном случае речь идет о так называемом виртуальном кабеле «К». В будущем необходимость в кабеле «К» должна отпасть.
Можно проводить одновременную диагностику нескольких блоков управления, входящих в систему.
CAN
Промышленная сеть CAN (Controller Area Network) была создана в конце 80-х годов фирмой Bosch как решение для распределенных систем, работающих в режиме реального времени. Первая реализация CAN применялась в автомобильной электронике, однако сейчас CAN находит применение практически в любых типах машин и промышленных установок, от простейших бытовых приборов до систем управления ускорителями элементарных частиц. В настоящий момент CAN-протокол стандартизован в международном стандарте ISO 11898.
Основные положения стандарта CAN.
В качестве среды передачи в CAN используется дифференциальная линия связи — витая пара, сигналы по которой передаются в дифференциальном режиме.
Для контроля доступа к среде передачи используется метод недеструктивного арбитража.
Данные передаются короткими (максимальная длина поля данных — 8 байт) пакетами, которые защищены контрольной суммой.
В CAN отсутствует явная адресация сообщений. Вместо этого каждый пакет снабжен полем арбитража (идентификатор+RTR-бит), которое задает приоритет сообщения в сети.
CAN имеет исчерпывающую схему контроля ошибок, которая гарантирует повторную передачу пакета, в случае возникновения ошибок передачи/приема сообщения.
В CAN существует способ автоматического устранения узла, являющегося источником ошибочных пакетов в сети.
CAN контроллеры.
Протокол CAN полностью реализован аппаратно — в виде микросхем- CAN контроллеров или в виде стандартного периферийного устройства в составе микросхемы- микроконтроллера. Все производители современных микроконтроллеров по крайней мере в одном из семейств имеют микроконтроллеры со встроенным периферийным одним или несколькими CAN-контроллерами. Таким образом, сегодня, СAN-контроллер является таким же стандартным периферийным устройством как контроллер SPI, I2C или UART.
Что такое CAN-шина
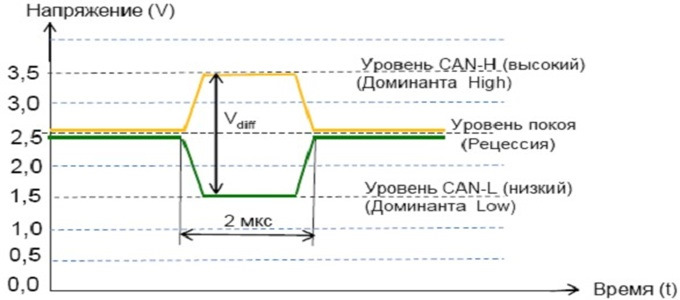
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.
Рецессивные и доминантные биты
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.
Как это исполнено физически
Физически CAN-шина – система из специального кабеля с разветвителями для подключения электронных блоков и конечных устройств-терминаторов (резисторов).
Используемый кабель
Указания по проверке
- Проверка напряжения (осциллограф): Для проверки напряжения должна быть подсоединена АКБ и включено зажигание.
- Измерение сопротивления: При измерении сопротивления необходимо, чтобы измеряемый объект перед измерением был приведен в обесточенное состояние. Для этого отсоединяется аккумуляторная батарея. Подождать 3 минуты пока разрядятся все конденсаторы в системе.
Информация по шине CAN
Шина CAN (Controller Area Network) является последовательной системой шин связи и отличается следующими признаками:
- распространение сигнала происходит в обоих направлениях.
- Каждое сообщение принимают все абоненты шины. Каждый абонент шины сам решает, будет ли он использовать сообщение,
- Дополнительные абоненты шины добавляются простым параллельным включением.
- Шинная система образует систему с задающим устройством. Каждый абонент шины может быть задающим или исполнительным устройством, в зависимости от того, подключен ли он в качестве передатчика или приемника.
- В качестве средства передачи используется двухпроводное соединение. Обозначения проводов: низкий уровень CAN и высокий уровень CAN.
- Как правило, каждый абонент шины может поддерживать связь по шине со всеми другими абонентами шины. Обмен данными по шине регулируется по правилам доступа. Основным отличием между шиной передачи данных K-CAN (кузовная шина CAN), шиной PT-CAN (шина CAN двигателя и трансмиссии) и шиной F-CAN (шина CAN ходовой части)является:
- K-CAN: скорость передачи данных ок. 100 Кбит/с. Возможен однопроводной режим.
- PT-CAN: скорость передачи данных ок. 500 Кбит/с. Однопроводной режим не возможен.
- F-CAN: скорость передачи данных ок. 500 Кбит/с. Однопроводной режим не возможен.
Задающее устройство: задающее устройство является активным партнером по связи, от которого исходит инициатива связи. Задающее устройство имеет приоритет и управляет связью. Оно может посылать пассивному абоненту шины (исполнительному устройству) сообщения по системе шин и после запроса принимать его сообщения.
Исполнительное устройство: исполнительное устройство является пассивным участником связи. Оно получает команду получать и передавать данные.
Система с задающим устройством: в системе с задающим устройством участники связи могут в определенный момент времени брать на себя роль задающего или исполнительного устройства.
Осциллографирование K-CAN, PT-CAN, F-CAN
Для большей ясности, работает ли шина CAN безупречно, необходимо понаблюдать связь по шине. При этом нет необходимости анализировать отдельные биты, а нужно лишь убедиться, что шина CAN работает. Осциллографирование показывает: ”шина CAN очевидно работает без нарушений”.
При измерении с помощью осциллографа напряжения между проводом низкого уровня CAN (или высокого CAN-High) и массой получают прямоугольный сигнал в пределах напряжения :
Низкий уровень CAN относительно массы: U мин = 1 В и U макс = 5 В
Высокий уровень CAN относительно массы: U мин = 0 В и U макс = 4 В
Эти значения являются приблизительными и могут отличаться, в зависимости от нагрузки шины, на величину до 100 мВ.
Настройки осциллографа для измерения на шине K-CAN:
| CH1: | Щуп 1, ранг 2 В/дел; соединение DC |
| CH2: | Щуп 2, ранг 2 В/дел; соединение DC |
| Время: | 50 мс/дел |
Рис. 1: Измерение K-CAN: CH1 низкий уровень CAN, CH2 высокий уровень CAN
При измерении с помощью осциллографа напряжения между проводом низкого уровня CAN (или высокого CAN-High) и массой получают прямоугольный сигнал в пределах напряжения :
Низкий уровень CAN относительно массы: U мин = 1,5 В и U макс = 2,5 В
Высокий уровень CAN относительно массы: U мин = 2,5 В и U макс = 3,5 В
Эти значения являются приблизительными и могут отличаться, в зависимости от нагрузки шины, на величину до 100 мВ.
Настройки осциллографа для измерения на шине PT-CAN (или F-CAN):
| CH1: | Щуп 1, ранг 1 В/дел; соединение DC |
| CH2: | Щуп 2, ранг 1 В/дел; соединение DC |
| Время: | 10 мс/дел |
Рисунок 2: Измерение PT-CAN: CH1 низкий уровень CAN, CH2 высокий уровень CAN
Порядок измерения сопротивления с согласующим сопротивлением K-CAN, PT-CAN и F-CAN
- Шина CAN должна находиться в обесточенном состоянии
- Не должны быть подключены другие измерительные приборы (параллельное включение измерительных приборов)
- Измерение производится между проводами низкого уровня CAN и высокого уровня CAN
- Фактические значения могут отличаться от заданных значений на несколько Ом.
На шине K-CAN нельзя провести отдельное измерение сопротивления, так как сопротивление изменяется в зависимости от логики включения ЭБУ!
PT‐CAN, F‐CAN
Для предотвращения отражения сигнала два абонента шины CAN (с максимальным удалением в сети PT-CAN) нагружаются сопротивлением 120 Ом. Оба нагрузочных сопротивления включаются параллельно и образуют эквивалентное сопротивление 60 Ом. При отключенном напряжении питания это эквивалентное сопротивление можно измерить между линиями передачи данных. Кроме этого, можно по отдельности измерить отдельные сопротивления.
Указания по измерению с сопротивлением 60 Ом: Отсоединить от шины легкодоступный ЭБУ. Измерить сопротивление на разъеме между проводами CAN низкого и высокого уровней.
Указание!
Не на всех автомобилях имеется согласующее сопротивление на шине CAN Наличие встроенного согласующего сопротивления на подключенном автомобиле можно проверить по соответствующей электрической схеме.
Шина CAN не работает
Если шина передачи данных K-CAN или PT-CAN не работает, то, возможно, имеется КЗ или обрыв провода CAN высокого или низкого уровней. Или неисправен ЭБУ.
Для локализации причины неисправности рекомендуется действовать следующим образом:
- По очереди отсоединять абонентов шины CAN до тех пор, пока не будет найден блок, являющийся причиной неисправности (= ЭБУ X).
- Проверить провода к ЭБУ X на отсутствие КЗ или обрыва.
- При возможности проверить ЭБУ X.
- Такая последовательность действий приводит к успеху только в том случае, если короткое замыкание имеет проверяемый провод от ЭБУ к шине CAN. Если провод в шине CAN сам имеет короткое замыкание, то нужно проверить жгут проводов.
Оставляем за собой право на опечатки, смысловые ошибки и технические изменения.
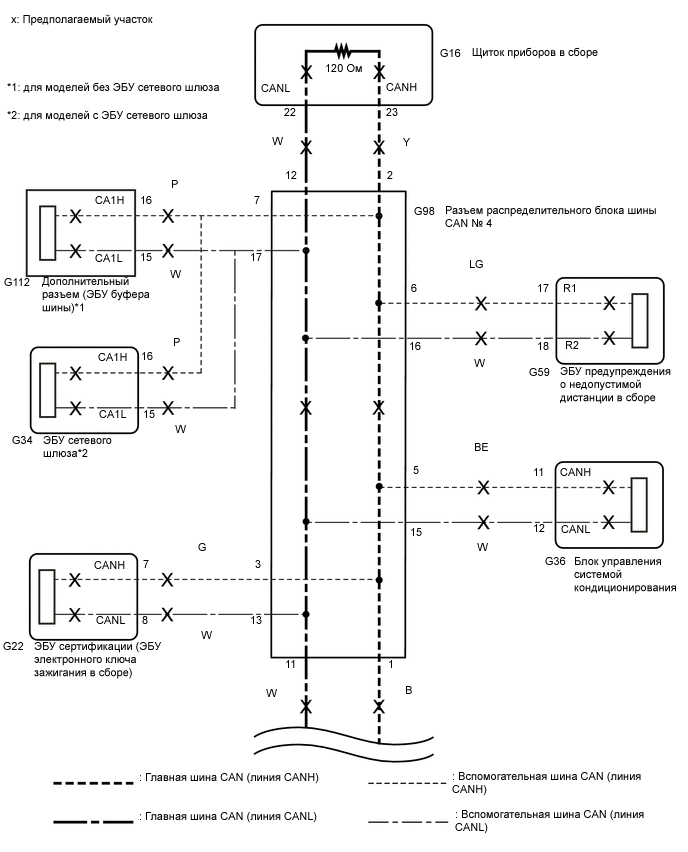
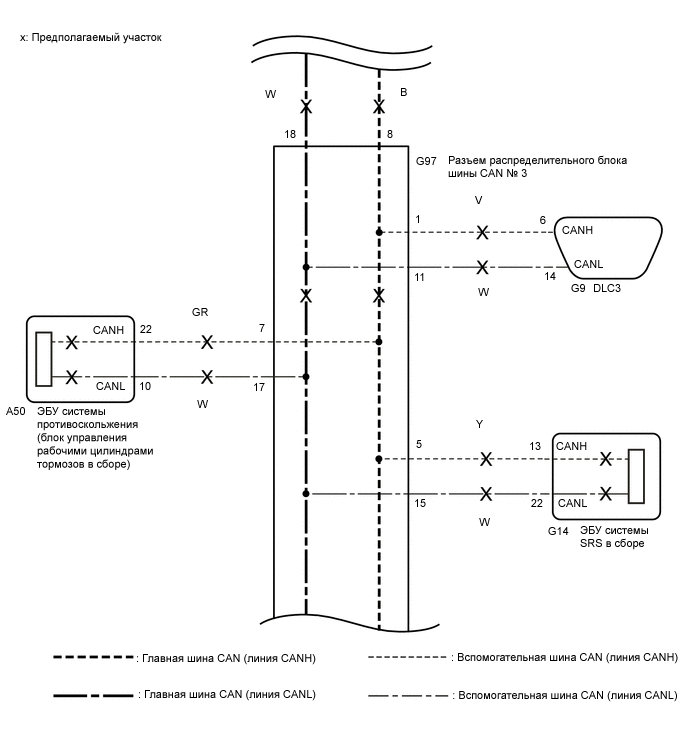
Между проводами главной шины V и/или вспомогательных шин CAN может быть короткое замыкание, если сопротивление между контактами 6 (CANH) и 14 (CANL) разъема DLC3 составляет менее 54 Ом.
Короткое замыкание в главной шине CAN
Короткое замыкание во вспомогательной шине CAN
Щиток приборов в сборе
ЭБУ рулевого управления с усилителем
Главный ЭБУ кузова (бортовой ЭБУ сети мультиплексной связи)
Датчик положения рулевого колеса
ЭБУ системы SRS в сборе
ЭБУ системы противоскольжения (блок управления рабочими цилиндрами тормозов в сборе)
Блок управления системой кондиционирования в сборе
ЭБУ сертификации (ЭБУ электронного ключа зажигания в сборе)
ЭБУ предупреждения о недопустимой дистанции
ЭБУ сетевого шлюза
(для моделей с ЭБУ сетевого шлюза)
Дополнительный разъем (ЭБУ буфера шины)
(для моделей без ЭБУ сетевого шлюза)
ЭБУ стояночного тормоза в сборе
Приемник системы навигации в сборе
(для моделей с приемником системы навигации)
Радиоприемник с дисплеем в сборе
(для моделей с радиоприемником с дисплеем)
Разъем распределительного блока шины CAN № 3
Разъем распределительного блока шины CAN № 4
СХЕМА ЭЛЕКТРИЧЕСКИХ СОЕДИНЕНИЙ
ПРЕДОСТЕРЕЖЕНИЕ / ПРИМЕЧАНИЕ / УКАЗАНИЕ
Перед измерением сопротивления шины CAN, выключите зажигание и оставьте автомобиль в покое на 1 минуту или более, не приводя в действие ключ, любые другие переключатели и не открывая/закрывая двери. После этого, отсоедините провод от отрицательного (-) вывода аккумуляторной батареи и перед измерением сопротивления оставьте автомобиль в покое на 1 минуту или более.
После выключения зажигания следует подождать некоторое время, прежде чем отсоединять провод от отрицательного (-) вывода аккумуляторной батареи. Поэтому, прежде чем приступать к этой работе, обязательно ознакомьтесь с примечанием относительно отсоединения провода от отрицательного (-) вывода аккумуляторной батареи.
Так как порядок проведения диагностики важен для получения корректных результатов, начните поиск неисправностей с раздела "Порядок поиска неисправностей", если выводятся коды DTC, связанные с системой передачей данных CAN.
После ремонта выполните процедуру проверки кодов DTC и убедитесь, что коды DTC не выводятся снова.
Процедура проверки кодов DTC: Включите зажигание (IG), подождите не менее 61 с и затем двигайтесь на автомобиле со скоростью не менее 20 км/час (12 миль в час) в течение не менее 10 минут.
После ремонта выполните проверку шины CAN и убедитесь, что отображаются все ЭБУ и датчики, подсоединенные к системе передачи данных CAN.
Перед заменой главного ЭБУ кузова (бортового ЭБУ сети мультиплексной связи), ECM или ЭБУ сертификации (ЭБУ электронного ключа зажигания в сборе) обратитесь к бюллетеню технического обслуживания.
Управление выключателем зажигания, какими-либо выключателями или дверями приводит к обмену данными между ЭБУ и датчиками по шине CAN. При осуществлении обмена данными сопротивление изменяется.
Если DTC регистрируется при непродолжительном движении на автомобиле даже после удаления кодов DTC, неисправность может возникать вследствие вибрации автомобиля. В подобных случаях необходимо пошевелить разъемы ЭБУ или жгутов проводов во время проверки, чтобы установить причину неисправности.
ПРОВЕРЬТЕ ШИНУ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (ЩИТОК ПРИБОРОВ)
Отсоедините провод от отрицательного (-) вывода аккумуляторной батареи.
Отсоедините разъем G16 щитка приборов.
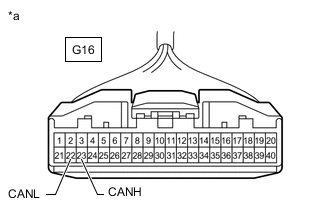
Вид спереди разъема со стороны жгута проводов:
(к щитку приборов в сборе)
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление |
|---|
| Подключение диагностического прибора | Условие | Заданные условия |
|---|---|---|
| G16-23 (CANH) – G16-22 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 108-132 Ом |
| Результат |
|---|
| Результат |
| OK |
| NG |
ЗАМЕНИТЕ ЩИТОК ПРИБОРОВ В СБОРЕ Нажмите здесь Click here
ПРОВЕРЬТЕ ШИНУ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (ECM)
Подсоедините разъем G16 щитка приборов в сборе.
Отсоедините разъем A53 ECM.
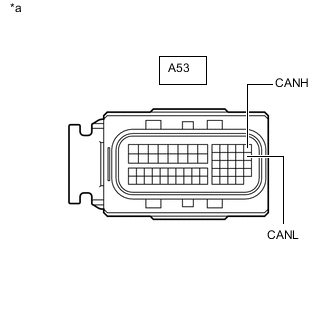
Вид спереди разъема со стороны жгута проводов:
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление |
|---|
| Подключение диагностического прибора | Условие | Заданные условия |
|---|---|---|
| A53-13 (CANH) – A53-26 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 108-132 Ом |
| Результат |
|---|
| Результат |
| OK |
| NG |
ЗАМЕНИТЕ ECM Нажмите здесь Click here
ПРОВЕРЬТЕ ШИНЫ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4)
Подсоедините разъем A53 ECM.
Отсоедините разъем G98 распределительного блока шины CAN № 4.
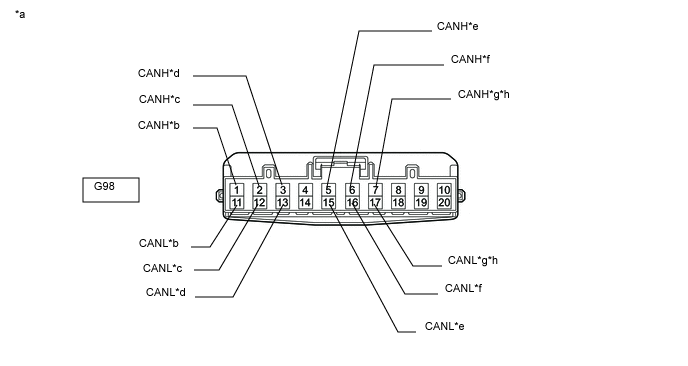
Вид спереди разъема со стороны жгута проводов:
(к разъему распределительного блока шины CAN № 4)
К ЭБУ сетевого шлюза
(для моделей с ЭБУ сетевого шлюза)
к дополнительному разъему (ЭБУ буфера шины)
(для моделей без ЭБУ сетевого шлюза)
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
200 Ом или более*3
1 МОм или более*4
| Результат | |
|---|---|
| Результат | Следующий шаг |
| OK | А |
| NG (главная шина распределительного блока шины CAN № 3) | B |
| NG (отводная линия ЭБУ или датчика) | C |
| NG (главная шина щитка приборов) | D |
ЗАМЕНИТЕ РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4
ПЕРЕЙДИТЕ К ШАГУ 5 Click here
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ЛИНИИ ГЛАВНОЙ ШИНЫ CAN ИЛИ РАЗЪЕМ (ЩИТОК ПРИБОРОВ – РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4)
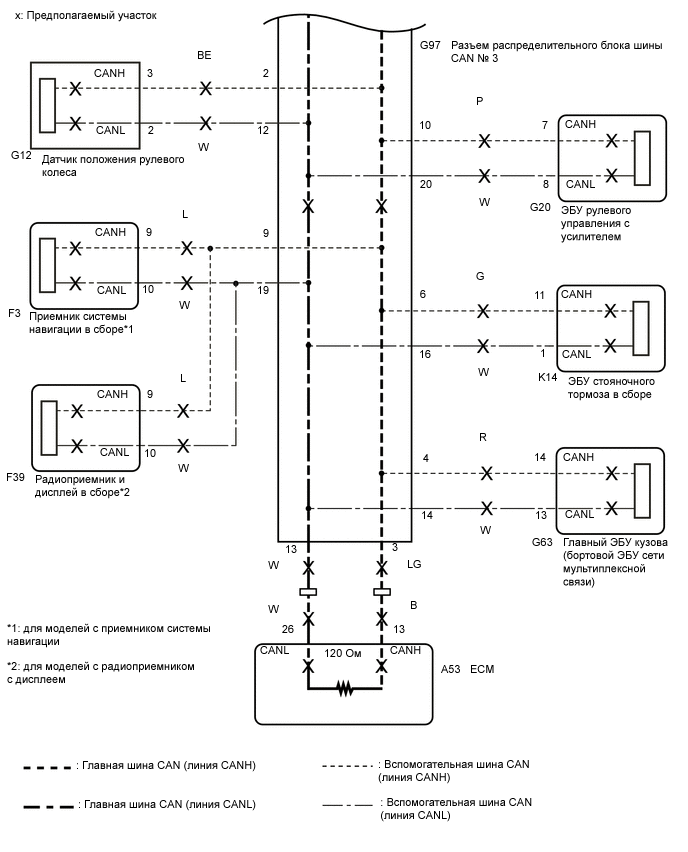
ПРОВЕРЬТЕ ШИНЫ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 3)
Отсоедините разъем G97 распределительного блока шины CAN № 3.
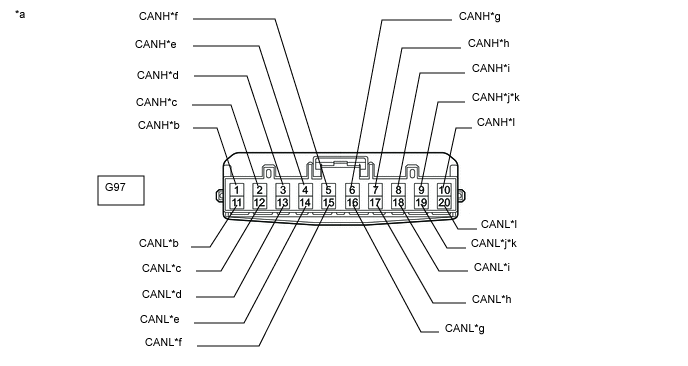
Вид спереди разъема со стороны жгута проводов:
(к разъему распределительного блока шины CAN № 3)
К приемнику системы навигации в сборе
(для моделей с приемником системы навигации)
к радиоприемнику с дисплеем в сборе
(для моделей с радиоприемником с дисплеем)
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление |
|---|
| Подключение диагностического прибора | Условие | Заданные условия | Куда подсоединить |
|---|---|---|---|
| G97-1 (CANH) – G97-11 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 1 МОм или более | DLC3 |
| G97-2 (CANH) – G97-12 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Датчик положения рулевого колеса |
| G97-3 (CANH) – G97-13 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 108 – 132 Ом | ECM |
| G97-4 (CANH) – G97-14 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Главный ЭБУ кузова (бортовой ЭБУ сети мультиплексной связи) |
| G97-5 (CANH) – G97-15 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ системы SRS в сборе |
| G97-6 (CANH) – G97-16 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ стояночного тормоза в сборе |
| G97-7 (CANH) – G97-17 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ системы противоскольжения (блок управления рабочими цилиндрами тормозов в сборе) |
| G97-8 (CANH) – G97-18 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 1 МОм или более | Разъем распределительного блока шины CAN № 4 |
| G97-9 (CANH) – G97-19 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Приемник системы навигации в сборе*1 |
| G97-9 (CANH) – G97-19 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Радиоприемник с дисплеем в сборе*2 |
| G97-10 (CANH) – G97-20 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ рулевого управления с усилителем |
| Результат | |
|---|---|
| Результат | Следующий шаг |
| OK | А |
| NG (главная шина распределительного блока шины CAN № 4) | B |
| NG (отводная линия ЭБУ или датчика) | C |
| NG (вспомогательная шина DLC3) | D |
| NG (главная шина ECM) | E |
ЗАМЕНИТЕ РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 3
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ГЛАВНУЮ ШИНУ CAN ИЛИ РАЗЪЕМ (РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4 – РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 3)
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ВСПОМОГАТЕЛЬНЫЕ ШИНЫ CAN, ПОДКЛЮЧЕННЫЕ К DLC3
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ЛИНИИ ГЛАВНОЙ ШИНЫ CAN ИЛИ РАЗЪЕМ (ECM – РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА CAN № 3)
ПРОВЕРЬТЕ ШИНУ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (ЭБУ, ДАТЧИК)
Подсоедините все жгуты проводов.
Отсоедините разъем, содержащий контакты CANH и CANL, от ЭБУ (или датчика), к которому подсоединена замкнутая накоротко вспомогательная шина.
| *1 | DLC3 |
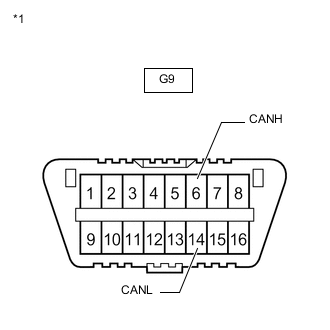
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление |
|---|
| Подключение диагностического прибора | Условие | Заданные условия |
|---|---|---|
| G9-6 (CANH) – G9-14 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 54 – 69 Ом |
Если при отсоединении разъема от ЭБУ (или датчика) сопротивление стало нормальным (54–69 Ом), возможно короткое замыкание в ЭБУ (или датчике).
| Результат |
|---|
| Результат |
|---|
| OK |
| NG |
ЗАМЕНИТЕ СООТВЕТСТВУЮЩИЙ ЭБУ ИЛИ ДАТЧИК
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ВСПОМОГАТЕЛЬНУЮ ШИНУ ИЛИ РАЗЪЕМ СООТВЕТСТВУЮЩЕГО ЭБУ ИЛИ ДАТЧИКА
Embeddedsoft.ru
В CAN сети все ЭБУ подключены к шине параллельно. Обмен данными производится короткими пакетами — сообщениями.
CAN сообщение
Каждое сообщение содержит идентификатор, который в сети является уникальным (например, «Температура двигателя 100 град» или «Скорость автомобиля 50 км/ч»). При передаче, все ЭБУ в сети получают сообщение и каждый из них проверяет идентификатор. Если сообщение имеет отношение к данному ЭБУ, то оно обрабатывается, в противном случае – игнорируется. Идентификатор может быть длиной 11 бит или 29 бит.

Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN
 Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN
 Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN

Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
- Спящий режим В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА.
- ПробуждениеКогда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ.
- Активный режимВ активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА.
- ЗасыпаниеВ момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
Description
Driver API for CAN Bus Peripheral (Driver_CAN.h)
The Controller Area Network Interface Bus (CAN) implements a multi-master serial bus for connecting microcontrollers and devices, also known as nodes, to communicate with each other in applications without a host computer. CAN is a message-based protocol, designed originally for automotive applications, but meanwhile used also in many other surroundings. The complexity of the node can range from a simple I/O device up to an embedded computer with a CAN interface and sophisticated software. The node may also be a gateway allowing a standard computer to communicate over a USB or Ethernet port to the devices on a CAN network. Devices are connected to the bus through a host processor, a CAN controller, and a CAN transceiver.
The CAN Driver API allows to implement CAN Interfaces that conform to the CAN specifications available from BOSCH:
- CAN 2.0B: CAN Specification 2.0B (released Sep. 1991) which is now superseded by ISO 11898-1.
- CAN FD: CAN with Flexible Data Rate introduced in 2012 (released April 17th, 2012).
Wikipedia offers more information about the CAN Bus.
CAN 2.0B** Every CAN CMSIS-Driver supports the CAN 2.0B standard
CAN 2.0B supports:
- message can contain up to 8 data bytes
- bitrates of up to 1Mbits/s
- requests
Support for CAN FD depends on the hardware. A CMSIS-Driver that supports CAN FD has the capability data field fd_mode = 1, which can be retrieved with the function .
CAN FD supports:
- message can contain up to 64 data bytes
- faster data transfers with faster bitrate used during the data phase
CAN FD does not support requests.
Block Diagram
The CAN Driver API defines a CAN interface for middleware components. The CAN Driver supports multiple nodes, which are able to send and receive messages, but not simultaneously.

CAN Node Schematic
Схема организации обмена данными
p, blockquote 18,0,0,0,0 —>
Структурно схему подключения различных блоков автомобиля к CAN-шине можно изобразить в таком виде:
p, blockquote 19,0,0,0,0 —>

p, blockquote 20,0,0,0,0 —>
Для согласования всех устройств, то есть организации оптимальных условий и скорости приемо — передачи, выходные сопротивления трансмиттеров должны быть приблизительно одинаковы.
p, blockquote 21,0,0,0,0 —>
В случае отключения или повреждения каких-либо из блоков управления систем автомобиля, сопротивление шины изменяется, нарушается согласование по сопротивлению, которое приводит к значительному уменьшению скорости передачи информации по шине. Такие нарушения могут привести к полной потере связи по CAN-шине.
p, blockquote 22,1,0,0,0 —>
На некоторых автомобилях для устранения проблем с синхронизацией CAN-информации применяется отдельный модуль межсетевого интерфейса.
p, blockquote 23,0,0,0,0 —>

p, blockquote 24,0,0,0,0 —>
Каждое сообщение, передаваемое по CAN-шине, имеет собственный идентификатор, например «температура охлаждающей жидкости» и код, соответствующий ее значению, типа «98,7 градусов Цельсия». Не обязательно это будут абсолютные значения, в большинстве случаев это относительные двоичные единицы, которые далее преобразуются в сигналы управления и контроля.
p, blockquote 25,0,0,0,0 —>

p, blockquote 26,0,0,0,0 —>
Эти же данные используют средства диагностики для контроля и обработки информации об основных системах автомобиля.
p, blockquote 27,0,0,0,0 —>
Основные режимы работы CAN-шины:
p, blockquote 28,0,0,0,0 —>
- активный (зажигание включено);
- спящий (при выключенном зажигании);
- пробуждение и засыпание (при включении и выключении зажигания).
Во время спящего режима ток потребления шины минимальный. Однако при этом по шине (с меньшей частотой) передаются сигналы о состоянии открытия дверей и окон, других систем, связанных с охранными функциями автомобиля.
p, blockquote 29,0,0,0,0 —>
В большинстве современных диагностических устройств предусмотрен режим диагностирования ошибок по CAN-шине. Технически это организовано непосредственным подключением проводников к диагностическому разъему.
p, blockquote 30,0,0,0,0 —>

p, blockquote 31,0,0,0,0 —>
История разработки и унификации Controller Area Network
p, blockquote 7,0,0,0,0 —>
Компания BOSCH, производя исследования в области автоматизации в 80-х годах прошлого века, предложила стандарт микроконтроллерной связи, который можно было применять и в автомобилестроении.
p, blockquote 8,0,0,0,0 —>
Стандарт CAN применяется не только в автомобилях. В настоящее время его используют в концепции «умный дом», промышленной автоматике и т.д.
p, blockquote 9,0,0,0,0 —>
Применительно к автомобильной технике стандарт CAN (Controller Area Network) адаптирован к шине с физическим уровнем. Она организована при помощи витой пары проводников, по которым идут пакеты сигналов разной полярности.
p, blockquote 10,0,0,0,0 —>
Такой стандарт получил международную классификацию ISO 11898. Кадр (пакет) включает 11-битный информационный сигнал (либо 29-битный в расширенном режиме).
p, blockquote 11,0,1,0,0 —>
В общем, CAN-шина не обязательно может быть реализована при помощи витой пары проводников. Это может быть и оптоволокно, и радиоканал.
p, blockquote 12,0,0,0,0 —> adsp-pro-1 —>
Можно предположить, что с введением беспилотных транспортных средств CAN-шина трансформируется в мобильный интерфейс передачи информации одного, а возможно, и комплекса автомобилей.
p, blockquote 13,0,0,0,0 —>
Применение в других отраслях
Легкость и простота технологии «CAN» раскрывают возможности ее применения не только для «железных коней». Шина используется также в таких областях:
- Производство велосипедов. Японская марка «Симано» анонсировала в 2009 году велосипед с многоуровневой системой управления механизма переключения скоростей на базе CAN. Эффективность этого шага была настолько очевидной, что по стопам «Симано» решили пойти и другие фирмы – «Маранц» и «Байон-икс». Последний производитель использует шину для системы прямого привода;
- Известна реализация так называемого «умного дома» по принципу CAN-шины. Множество устройств, которые могут решать определенные задачи без участия людей (автоматический полив травы на газоне, термостат, система видеонаблюдения, управление освещением, климат-контроль и т. д.) объединены в единую систему передачи данных. Правда, специалисты находят применение сугубо автомобильной технологии в человеческом жилище достаточно сомнительным. В числе слабых сторон такого шага – отсутствие единого международного стандарта КАН для «умных домов».

CAN-шина немного теории и практика

Уже сегодня CAN интерфейс уверенно вытесняет UART-производные интерфейсы (rs485, rs232) как более функциональная шина с большей производительностью, и на это есть причины. Но до сих пор не так много разработчиков знает как и с чем «есть» этот интерфейс. Попытаемся рассмотреть немного примеров и поделиться собственным опытом использования этого интерфейса, а также общую теорию, примеры применения и практические рекомендации по использованию.
Что же такое CAN-bus, в общих словах это подобный ethernet интерфейс, описывающий логику работы шины, при этом не привязан ни к какому физическому уровню, ну и конечно ни к какому протоколу. Интерфейс очень продуман, он исключает коллизии, ошибки на линии и гарантирует доставку, при этом в нем нет архитектуры master-slave, тут каждое устройство просто «выкидывает» на линию данные и все устройства могут просматривать полученные данные, как-будто все master’ы. Скорость на кан-шине — до 1 Мбит. Да да, такое даже и не снилось rs485, на смену которого пришел CAN.
При таких плюсах есть и свои недостатки. Устройств с интерфейсом UART очень много, а вот с поддержкой CAN bus очень мало. В то же время тормозящим фактором для новой шины является сама сложность программной реализации низкого уровня (драйвера), не каждый программист готов взяться за освоение новой тематики. UART конечно есть везде и даже на самом простом процессоре, это один из самых старых интерфейсов, соответственно даже самый ленивый программист хоть раз сталкивался с таким интерфейсом.
Если же процессор не имеет на борту CAN-контроллера, это не так страшно. Многие используют микросхемы типа mcp2510, это контроллер, подключаемый по SPI. Его используют многие производители электроники, embedded linux имеет даже поддержку этого чипа в некоторых BSP, так что подключить кан-контроллер к устройство с маленьким линуксом может не составить труда.
Теперь немного о физической реализации. Есть стереотип, что CAN связан с физической реализацией. Это не так. Но тем не менее чаще всего используется витая пара для передачи сигнала, уровень сигнала в витой паре чуть больше 3 вольт. Сигнал хорошо видно на осциллографе, при правильном подключении это набор прямоугольных импульсов. Есть так же оптическая реализация физической линии, по сути сигналы в ней ничем не отличаются.
Если мы говорим про реализацию витой парой, то стоит знать еще несколько вещей. На концах шины стоят развязывающие сопротивления, их значения 120 Ом. Практика показывает, что возможно использование и резисторов номиналом около 500 Ом. Применение этих резисторов связано с распространением сигнальных волн высокой частоты. Также есть мнение, что стоит использовать кабель не менее 1 метра для связи двух устройств, хотя все конечно зависит от навыков схемтохника и понимания того, что происходит на шине.
Can шина автомобиля что это такое
В современных машинах используются электронные блоки управления (ЭБУ, ECU — Electronic Control Unit) для контроля и управления различными системами машины, такими как гидравликой, коробкой передач и двигателем. Аналогично тому, как компьютеры могут быть соединены в одну сеть, блоки управления в машине тоже можно объединить.
Преимущества сетевого соединения:
- Более чувствительная система управления
- Получение более полных и надежных данных
- Обнаружение неисправностей и управление настройками производится средствами программного обеспечения.
Например, ЭБУ двигателя может обмениваться с другими ЭБУ машины по системе сети CAN.
Система CAN: Controller Area Network — сеть контроллеров. CAN разработан компанией Robert Bosch GmbH в середине 1980-х и в настоящее время получил широкое применение в автомобильной, авиационной, тракторостроительной и других видах промышленности.
Электронная система связи CAN, которая объединяет все блоки управления машиной в сеть с общим кабелем(шиной) и состоящая из одной пары проводов, называется шиной CAN. Закодированные данные посылаются от блоков управления на шину CAN.
Рисунок — CAN шина из 4-х блоков управления.
Выше показана шина CAN, состоящая из 4-х блоков управления. На концах общего кабеля (шины) устанавливается согласующие сопротивления (терминаторы, резисторы) Обычно сопротивление каждого резистора составляет 120 Ом. Применение согласующих резисторов на концах системы позволяет избежать отражение сигнала в конце линии тем самым обеспечивая нормальную работу всей CAN сети.
Передача сигналов в шине CAN осуществляется посредством двух скрученных между собой проводов (витая пара, Twisted Pair) Применение витой пары проводов, обусловлено дифференциальной передачей данных и высокой защитой такого решения от внешних помех.
В нашем случае блок №2 отправляет один сигнал по двум витым проводам в шину CAN, причем у этого сигнала будет различное напряжение на каждом проводе витой пары. Другие блоки в сети читают сигнал и определяют какому блоку оно предназначено и какую команду нужно выполнить (Блоки №1 и №4)
 Рисунок — Принцип линии CAN
Рисунок — Принцип линии CAN
Так происходит передача сигналов по шине CAN. Сами эти сигналы представляют собой «кадры» (сообщения), которые принимаются всеми элементами сети CAN. Полезная информация в кадре состоит из идентификационного поля (идентификатора) длиной 11 бит (стандартный формат) или 29 бит (расширенный формат, надмножество предыдущего) и поля данных длиной от 0 до 8 байт. Идентификационное поле говрит о содержимом пакета и служит для определения приоритета при попытке одновременной передачи несколькими сетевыми узлами. Также в кадре (сообщении) помимо полезной информации содержится служебная информация. Она представлена полями проверки, полем отзыва и другим полями. В конце кадра содержится «поле конец сообщения»
В шине CAN сообщения от блоков управления должны передаваться в общую шину , то для исключения конфликтов между блоками, каждый узел перед отправкой кадра проверяет сеть на передачу доминантного бита. Устройство передающее доминантный бит считается приоритетным. Таким образом устройство будет дожидаться освобождения линии CAN. С одной стороны такой алгоритм работы повышает быстродействие, но с другой при неправильной работе одного из блоков управления возможна полная «загрузка» CAN шины и невозможность отправки сообщении другими блоками, элементами сети CAN (Линия для них будет всегда занята).

Рисунок —Структура сообщения
Напоследок пример работы:
Переключением кнопки инициируем команду блока управления №1 передачу сообщений в шину CAN. Блок №2 получает сообщение и расшифровав в сообщении что кадр пришел для него с командой включить свет. Подается бортовое напряжение на потребитель.
 Рисунок — Принцип коммуникации через CAN
Рисунок — Принцип коммуникации через CAN
Вот такой принцип работы шины CAN без конкретных углублений. Также стоит отметить, что шина CAN может иметь свои особенности, зависящее от области применения и фирмы производителя. В статье я рассказал о наиболее часто встречающейся шине CAN, которую можно встретить в современных грузовых и легковых автомобилях, тракторах и разнообразной спец технике.
1″ :pagination=»pagination» :callback=»loadData» :options=»paginationOptions»>
Статья написана по материалам сайтов: www.ugona.net, voditeliauto.ru, catterbet.com.
Работа кан-шины
Рассмотрим подробнее работу CAN-шины на автомобиле. Как было описано ранее она представляет из себя витую пару, перекрученных между собой двух проводов. На автомобиле эта шина последовательная, то есть данные по ней передаются поочерёдно по одному или другому проводу. Питание электроприборов при этом осуществляется другим более толстым проводом.
Может возникнуть вопрос, для чего КАН-шина на автомобиле выполнена в виде двух проводов, если данные передаются только по одному. И почему применяется последовательный интерфейс с более низкой скоростью, чем параллельный. Для экономии материала логичнее было бы сделать одним проводом, тем более такие системы применяются в промышленности. Всё дело в электрических, электромагнитных и других помехах, которые есть на автомобиле. Эти помехи создают посторонний сигнал в шине и при применении однопроводного исполнения этот сигнал способен привести к сбою в оборудовании. Если шина выполнена в виде двух перекрученных между собой проводов, так называемая витая пара, то посторонний сигнал будет генерироваться в обоих проводах, но так как они перекручены. Приемник, получает сигнал по сигнальному проводу и убирает повторяющиеся импульсы поступающие по второму проводу.
Ещё одна особенность CAN-шины это передача данных в обе стороны, как от управляющего к исполнительному элементу, так и на оборот. То есть если от выключателя лампы на фонарь приходит сигнал на включение, то от фонаря на выключатель посылается сигнал, горит лампа или нет. Так же при передаче данных их по шине их получают всё оборудование, подключенное к ней, а не конкретное к которому адресованы эти данные.
Обмен данными посредством шины CAN

Применяемая на автомобилях система CAN позволяет установить связь между отдельнымиэлектронными блоками управления. При эксплуатации автомобиля и при диагностикеего агрегатов эта система предоставляет возможность использования новых функций,которые не могут быть возложены на отдельно действующие блоки управления.Общие сведения по теме «Шина данных CAN» были впервые приведены в Программесамообучения 186; в настоящей Программе рассказывается об основных функциях системыCAN в ее современном состоянии.
Для чего служит система шин данных?Применяемая на автомобилях система CAN позволяет объединить в локальную сеть электронныеблоки управления или сложные датчики, как, например, датчик угла поворота рулевого колеса.Обозначение CAN является сокращением от выражения Controller:Area:Network (локальная сеть,связывающая блоки управления). Применение системы CAN на автомобиле дает следующиепреимущества:
•Обмен данными между блоками управления производится на унифицированной базе.Эту базу называют протоколом. Шина CAN служит как бы магистралью для передачи данных.•Независимо действующие системы, например, система курсовой стабилизации ESP, могут бытьреализованы с меньшими затратами.•Упрощается подключение дополнительного оборудования.•Шина данных CAN является открытой системой, к которой могут быть подключены как медныепровода, так и стекловолоконные проводники.•Диагностика электронных блоков управления производится посредством кабеля «К».Диагностика некоторых компонентов оборудования салона автомобиля уже сегодня производитсячерез шину CAN (например, это подушки безопасности и блоки управления в дверях автомобиля). Вданном случае речь идет о так называемом виртуальном кабеле «К». В будущемнеобходимость в кабеле «К» должна отпасть.•Можно проводить одновременную диагностику нескольких блоков управления, входящих всистему.
От центрального блока управления к децентрализованной сети с несколькими блоками управления

Автомобиль с центральным блоком управления

Автомобиль с тремя блоками управления

Автомобиль с тремя блоками управления, объединенными в сеть посредством системы шин данных

К системе CAN параллельно подключены многочисленные компоненты.При проектировании системы учитываются следующие требования:•Обеспечение максимальной надежности: внутренние и наружные помехи должны бытьобязательно распознаны.•Высокая живучесть: при выходе из строя одного из блоков управления система должнапродолжать функционировать, обеспечивая обмен данными между ее работоспособнымикомпонентами.•Высокая плотность потока данных: все блоки управления должны в каждый момент временирасполагать одинаковой информацией и получать одинаковые данные; при повреждении системывсе блоки управления должны получать информацию о ее неисправности.•Высокая скорость передачи данных: обмен данными между подключенными к сети компонентамидолжен производиться возможно быстрей, чтобы обеспечить требования передачи в реальномвремени.
Сигналы передаются шиной CAN в цифровом виде; в настоящее время для их передачи используютсямедные провода. При этом надежно обеспечивается скорость передачи данных до 1000 кбит/с(1 Мбит/с).

- Вперёд >
интерфейсControl Area Network
CAN (Control Area Network) — последовательная магистраль, обеспечивающая увязку в сеть «интеллектуальных» устройств ввода/вывода, датчиков и исполнительных устройств некоторого механизма или даже предприятия. Характеризуется протоколом, обеспечивающим возможность нахождения на магистрали нескольких ведущих устройств, обеспечивающим передачу данных в реальном масштабе времени и коррекцию ошибок, высокой омехоустойчивостью. Система CAN обеспечена большим количеством микросхем, обеспечивающих работу подключенных к магистрали устройств, разработку которых начинала фирма BOSH для использования в автомобилях, и в настоящее время широко используемых в автоматизации промышленности. Цеколёвка разема приведена на рисунке.
Источник https://starifaeton.ru/info/proverka-kan-shiny-multimetrom/
Источник https://7gear.ru/remont/can-sina.html
Источник
Источник
  |